
Montáž
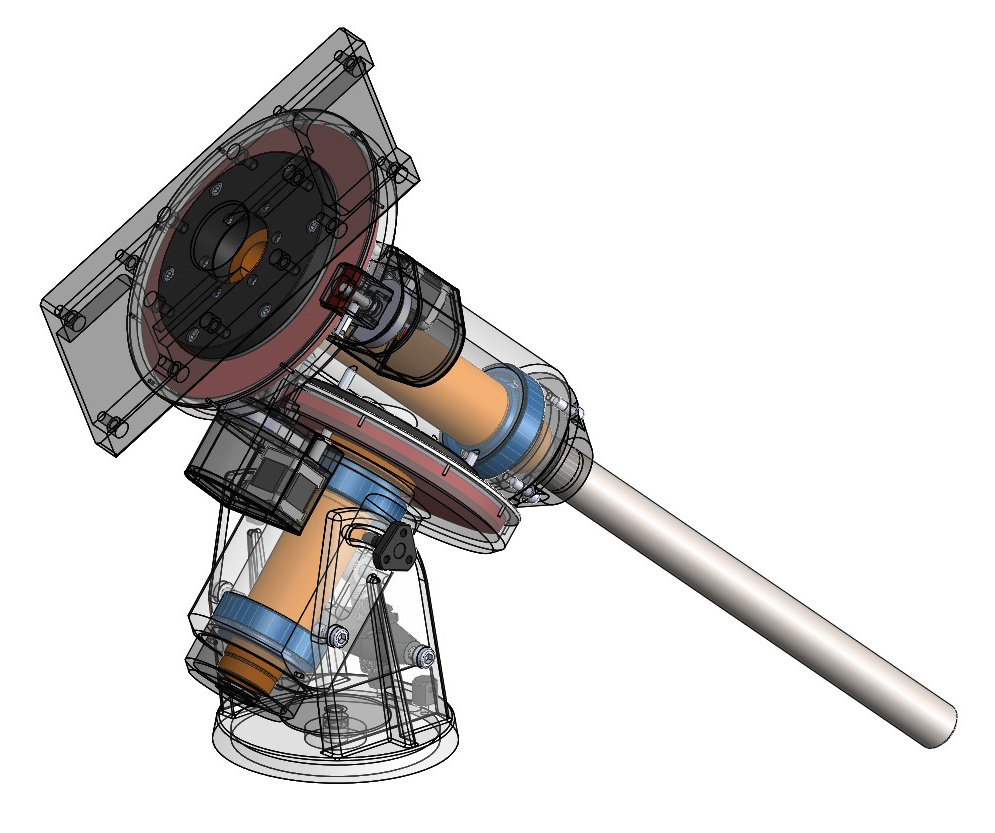
Nechtěje utratit nějakých 100-200 tisíc kč za velkou montáž do své nové pozorovatelny, pustil jsem se do výroby sám. V plánu byla montáž s nosností nějakých 100-120kg na kříži, pokud možno s minimální periodickou chybou a bez vůlí. Padla tak volba na montáž s třecím převodem. Nejprve se odehrála fáze zkoumání možností, konstrukce, výpočtů, z čehož vzešel tento 3D model a hromada výkresů:

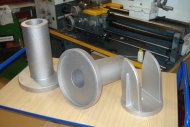
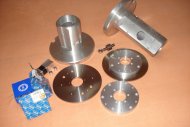
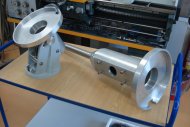
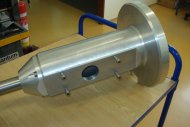
Pak už následovala výroba tří odlitků (za což mockrát děkuji jednomu kolegovi z AstroFóra, však on ví), které postupně v dílně začínaly nabírat své finální tvary. Konstrukce hlavních částí byla zvolena tak, aby se vše dalo vyrobit bez CNC mašiny s tím, co mám k dispozici v dílně (soustruh) a u kolegy (frézka, bruska na kulato). V následující galerii je první část výroby mechaniky montáže až po první složení dohromady (zatím bez pohonů). Na některých snímcích je i moje maličkost, takže si lze již udělat představu o velikosti montáže.
















Dalším krokem bylo přestěhování montáže ke mě domů (do ložnice/pracovny v paneláku, k veliké radosti mé ženy). Tam byly namontovány pohony, a k řízení při prvních testech byl použit řídící systém mé vlastní konstrukce, který mám namontovaný na montáži EQ6. Montáž je zatím bez povrchové úpravy. Obráběné díly budou černě eloxované. Odlitky (podstava + bloky RA a DE osy), které jsou neeloxovatelné, budou mít nástřik bílou barvou. Něco jako je na prvním úvodním obrázku modelu.
Osy jsou duté, takže kabeláž půjde RA a DE osou až k upínací desce. V zahloubeních upínací desky na bocích bude integrován na jedné straně USB hub, na druhé straně elektronika vícekanálového regulovatelného vyhřívání (pro optiku dalekohledu a pointéru) a několik rozboček na napájení 12V.
Ve finální podobě je montáž vybavena řídícím systémem Pulsar2, který za rozumnou cenu řeší probematiku řízení montáže s enkdéry na RA a DE osách.




A takhle vypadalo první projetí montáže s motory (omluvte mizernou kvalitu, natočeno mobilem):
Pak jsem montáž při první vhodné příležitosti vynesl pod oblohu. Sice občas chodily mraky, ale jakž-takž se zadařilo. Použil jsem moji vlastní GO-TO elektroniku od EQ6, která má dělení na 64 mikrokroků.
- Při zvětšení 450x na Vixenu VC200L byl chod absolutně klidný, bez jakýchkoli vibrací.
- Reakce na jemné pohyby (pointaci) okamžité, vůle rovna nule. Prostě tam žádná není.
- Test přesnosti chodu, Canon EOS 40D na Vixenu VC200L, 1800mm ohnisko, je na následujícím obrázku:

Chyba v RA za 23min expozice je kolem 5". Perioda třecího převodu je 48min, ale na to nebyl čas, nalezly mraky. Průběh je velmi plynulý. Ještě pokusím zpřesnit chod optimalizací toho řemenového převodu. Perioda těch dvou vlnek vypadá jako otočka řemenice. Časově to sedí. Jsem si vědom, že mám tu řemeničku vyvrtanou a nasazenou na hřídeli motoru s házivostí asi 0,03mm, měřeno úchylkoměrem na vrcholcích zubů. To bude ta největší nepřesnost, zbylé chyby jsou podstatně menší (házivost třecího disku, měřeno už v montáži v ložiskách, je 5um a u třecí rolny 3um). Jen nevím, jak vyvrtat řemeničku přesněji. I když to předem navrtám navrtávákem v kleštinách v soustruhu, vrták mi pak vždycky malinko někam sjede (zkusil jsem dvě, na RA jsem vybral tu přesnější). Samozřejmě průměr je přesný (na hřídeli to nevaklá), projetý výstružníkem, ale ten už excentricitu neopraví. Problém je, že to nejde do ničeho upnout díky tomu čelu řemenice. Vyrobil jsem si váleček s vnitřním otvorem, abych do nej tu řemenici strčil na těsno. Pak jsem ji rozřízl na dvě poloviny, naklapnul na obvod zubů, a upnul do soustruhu. Nicméně pod pár setin excentricity se mi dostat nedařilo.
Dále tam jsou na průběhu vidět ještě nějaké drobné oscilace kolem 1" s periodou asi jednoho zubu ozubené řemeničky (tedy něco přes minutu), ale s těmi jsem počítal. Zatím je tam jen malé opásání řemeničky, asi jan 1/4 obvodu, protože ještě nemám nasazený delší řemen a napínací kladku, která řemen pěkně omotá kolem alespoň 2/3 obvodu. Takže jak nabíhají zuby, tak to maličko "drncá". Toto zmizí, až mi přijde delší řemen a mikro-ložiska na napínací kladku.
Nicméně na doma dělanou montáž je to velmi slušný výsledek. Ještě na těch převodech zapracuji, chtěl bych to mechanicky dostat někde k +/-1" a zbytek doženu elektronikou.
Nakonec jsem řemenový převod opustil, a i tento převod z motorku na rolnu udělal třecí. Jelikož všechny díly jsou vyrobené broušením, lze to udělat velmi přesně a bez excentricit. Chod se po této změně rapidně zlepšil, montáž má nyní chybu za nějakých 20 min chodu kolem +/-1-2" a těžko říci že periodickou. To už budou jen nějaké zbytkové nepravidelnosti povrchů.
Na snímku je kulová hvězdokupa M5, montáž utíká v DE vlivem úmyslného neustavení, chyba trackingu v RA je to nepatrné zvlnění stopy:

Tímto považuji mechanickou část montáže za vyřešenou, lépe už to asi nijak jednoduše nepůjde a pro účel použití montáže je ten výsledek více než dostačující. Maximální expozice bez pointace bude stejně spíš limitovaná již refrakcí, průhyby dalekohledu a dalšími vlivy.
Montáž tedy byla opět rozebrána a díly putovaly do lakovny a na elox. Po návratu byla montáž opět složena, doufejme že naposledy, a po přezkoušení doma umístěna do kopule. Prozatím na ní je umístěn můj malý výjední astrograf N185/610. Ve finále bude osazena 300/1200mm Newtonem.








A takhle montáž funguje. Maximální rychlost, kterou zvládnou motory a řídící elektronika, co mám na EQ6-ce, je zhruba 15°/sec. U finálního systému Pulsar 2 je rychlost z nějakého důvodu softwarově omezená na 999-násobek siderické rychlosti. Budu muset tvůrce Pulsaru přesvědčit k odstranění toho limitu :-)