
N400 astrograf
Několik posledních let jsem uvažoval o upgrade hvězdárny na větší přístroj, disponující více možnostmi. Stávající 300mm newton sice fungoval vcelku dobře, ale přeci jen trpěl několika nedostatky:
- nesnadná výměna kamery. Pokud jsem chtěl podle typu objektu vyměnit kameru (pro dosažení jiného rozlišení, např. velké DSO - kamera G3-16200, drobné DSO - ASI1600, planety, měsíc - kamera s barlow či okulárovou projekcí) znamenalo to vše přepojit, zjustovat kameru, zaostřit OAG. To nebylo moc operativní, když jsem například v průběhu noci zjistil, že je vynikající seeing a že by šlo snímat něco malého, citlivého na podmínky
- Nestabilita hliníkového tubusu při snímání s velkým rozlišením (ASI 1600 s 3.8um pixely). Prostě i celkem bytelný plechový tubus měl své limity, a kraje již nestály za nic a musel jem obraz ořezávat. Plánovanou 61 Mpix fullframe kameru by již téměř jistě nezvládl
- Docela krátké ohnisko: Marná sláva, spousta objektů je prostě mrňavých, a ani 1200mm ohnisko není stále to pravé, a mívám tu noci, kdy by byl seeing vyhovující i pro delší ohnisko. A natažení ohniska korektorem problém moc neřeší (pokles světelnosti, zhoršení kresby).
Rozhodl jsem se proto, že pro svoji hvězdárnu postavím nový přístroj, robustnější a větší. Nejprve jsem si pohrával s myšlenkou na stejný půlmetr, jako jsem stavěl do Jindřichova Hradce. Ale po vymodelování situace v kopuli přišlo vystřízlivění. N500/2000 se tam prostě na německou paralaktiku nevejde. Leda do vidlice, ale přestavovat montáž se mi fakt nechtělo. I 450-ka byla na hraně, a jen velmi těžko bych se kolem ní pohyboval, a tak jsem se rozhodl "obětovat" pro astrograf moje zrcadlo Orion Optics 400/1600mm ze 400mm dobsona, s tím, že do dobsona si pak koupím nějaké tenčí, lehčí.
Jinak je dalekohled navržený podobně jako Jindřichohradecký, tedy se čtyřmi výstupními šachtami a rotátorem sekundárního zrcátka. Jediná změna je ve způsobu ostření. Abych nemusel řešit čtyři elektronické fokuséry (což je dost vysoká investice), rozhodl jsem se pro jemné ostření pohybem primárního zrcadla. Místo výtahů jsou na jednotlivých výstupních otvorech tubusu justovatelné příruby s průměrem 3", do kterých se na bezvůlový svěrný spoj (kleštinu) upíná přímo smontovaná sestava korektoru s kamerou. Polohou korektoru se zaostří nahrubo pro všechny kamery shodně, a jemné ostření (zdvih asi +/-7mm) již obstarává elektronicky posouvaná objímka primárního zrcadla.
Všechny výstupy pro jednotlivé polohy rotátoru sekundárnho zrcátka počítají s možností upnutí 3" nebo přes reducki i 2" komakorektoru. Plánuji na tubus postupně navěsit toho vybavení:
výstup 1: Fullframe Mono CMOS kamera C3-61000 se 7-pozičním filtrovým kolem s LRGB a SHO sadou čtvercových filtrů 50x50mm. na 3" Riccardi Wynne korektoru + OAG. Pro větší DSO objekty.
výstup 2: Mono CMOS kamera ASI 1600 se sedmipozičním filtrkolem na 36mm LRGB a SHO filtry, na ES-HR korektoru + OAG, pro menší DSO objekty, a např. i Měsíc v primárním ohnisku.
výstup 3: Jeden volný výstup s ASA Wynne 3" korektorem pro účely testování různých kamer, vybavení, nebo snímaní barevným senzorem (třeba pro komety), prozatím pomocí modifikovaného Canonu EOS 6D.
výstup 4: pro planetární/lunární snímání. Buď mono kamera s 1.25" filtrkolem (ZWO) nebo barevná kamerka (Celestron Skyris) + ADC korektor. Po vyjmutí možnost vizuálního pozorování. Na tomto výstupu je možno mít klasický 2" fokusér (TS V-power Crayford).
Tolik tedy plány.
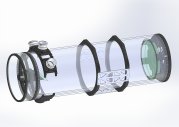
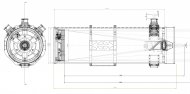
Tubus astrografu je skořepina z uhlíkového kompozitu, tloušťka okolo 14mm (1.5mm kompozitu z obou stran na 10mm jádře z tvrdé pěnové výztuže), povrch lakovaný dvousložkovou lesklou barvou, vnitřek tubusu je s naneseným černým sametovým povrchem pomocí tzv. flokování. Hmotnost holého tubusu je okolo 12kg.
Na obrázcích níže je 3D model a řez tubusem, pro představu jak je to řešeno.
Výroba začala rozkresem řezacího plánu aby se minimalizoval odpad a tím i cena, a odesláním těchto výkresů dílů na výřezy vodním paprskem z desky z Al slitiny tloušťky 30 a 10mm. Vyřezané díly byly buď pouze obroušeny a okuličkovány, pouze část z nich, kde je třeba vyšší přesnost pro zajištěn funkcionality, byly obrobeny (CNC, soustruh). Následně byly odvezeny na elox nebo práškové lakování. Na obrázích jsou vidět objímky tubusu, pavouk, pevný a pohyblivý díl objímky zrcadla, střed a klínek sekundáru, třemny pro justovatelné základny výstupních objímek korektorů, křížem posuvné základny pro korektory, vahadla pro uložení zrcadla a nějaké další díly.


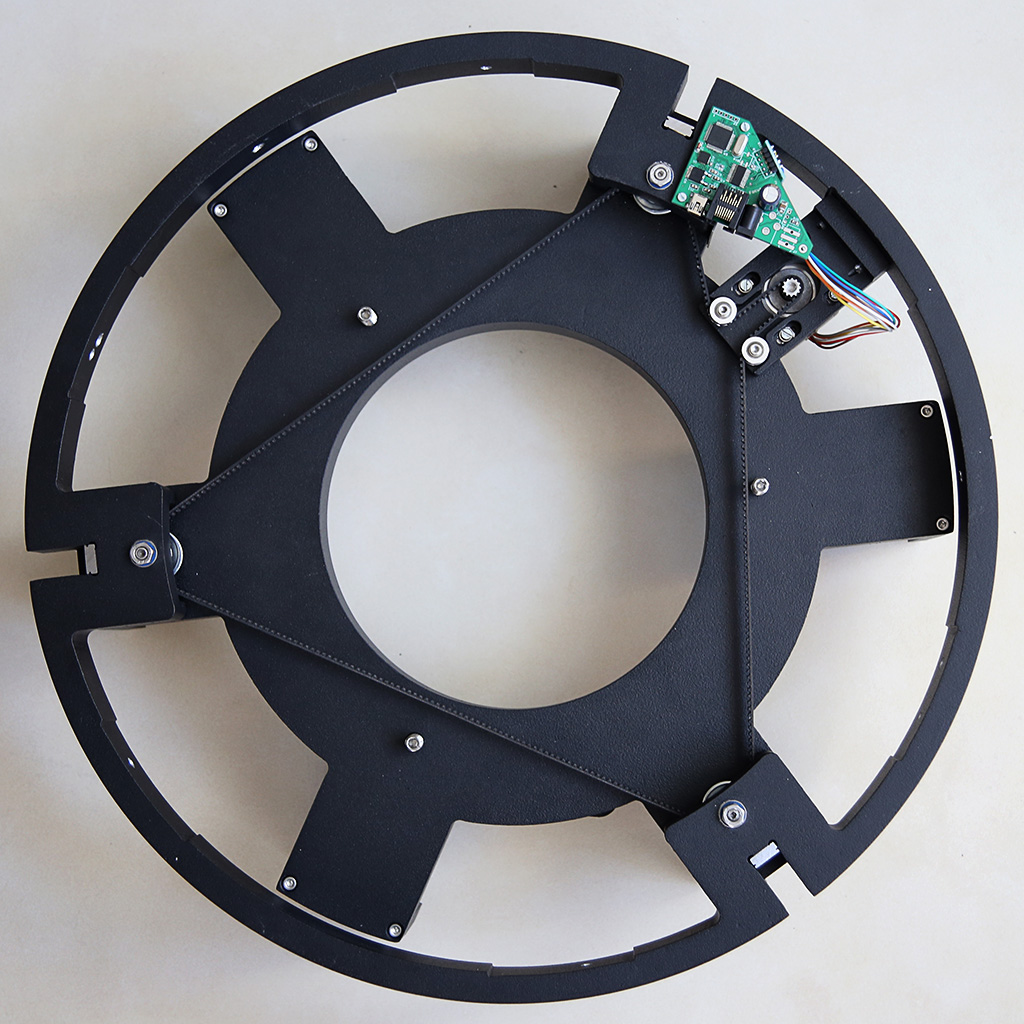
Mezi tím jsem vyráběl druhý exemplář rotátoru sekundárního zrcátka. Je identický jako na půlmetru v J. Hradci, a návrh jsem ponechal beze změny. Svým průměrem 140mm vyhověl i pro 130mm sekundární zrcátko 400-ky, které se tak alepoň schová za rotátor, fungující jako jasně definovaná kruhová clona, nezhoršující difrakční obrazec. Kablík napájení rotátoru a kablík k tlačítku vede 2mm širokou a 5mm hlubokou drážkou vyfrézovanou ve 4mm tlustém rameni pavouka. Na obrázcích níže je reálná realizace toho mechanismu.



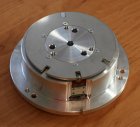
Rotátor sekundáru je složený z vnějšího dílu, za který se montuje a kolimuje v pavouku. V něm se ve dvojici tenkostěnných ložisek otáčí vnitřní část, zakončená kulisou z nerezové oceli, do jejichž výřezů zapadá aretační západka, mechanicky definující přesné a opakovatelné úhly natočení. Na tomto středu je normální kolimovatelný klínek se sekundárem. Západka je tvořena miniaturním nerezovým ložiskem, uchyceným na lineárním kuličkovém vedení v předepnutém provedení, které má tím pádem nulovou stranovou vůli. Západka je shora tlačena ke kulise silnou pružinou, takže sama zaskočí a dotlačí kulisu do správné polohy. Otáčení je pomocí DC motoru s převodovkou, snímání toho, která poloha je právě aktuální je realizované magnetem a hallovými sondami, zapadnutí západky do drážky v kulise hlídá mikrospínač. Princip funkce je takový, že při projetí magnetu okolo snímače se pozná, že už je poloha blízko západky. Motor zpomalí, a přes spojku s vůlí kulisa předběhne motor, a mechanicky zapadne do správné polohy a rozpene mikrospínač. Tím motor zastaví úplně. Přesná poloha tedy není dána motorem a snímačem, ale mechanicky kulisou. A v té poloze také kulisa dostatečně pevně drží polohu díky pružině tlačící na západku. Rotace se ovládá tlačítkem od výtahu, a v případě dálkového provozu přes prohlížeč, zařízení komunikuje přes wi-fi modul ESP8266 s vestavěným web-serverem. Součástí je i řízené vyhřívání sekundárního zrcátka. Funkci ozřejmí video z testování rotátoru na stole. Stejný test byl pro jistotu provedený i s rotátorem po vyndání z -18° v mrazáku. Vše fungovalo bez závad.
Další složitější a prozatím nikdy nevyzkoušenou komponentou byla sestava pohyblivého uložení mísy zrcadla pro účely ostření. Synchronní pohon všech tří šroubových posuvů je provedený pomocí dlouhého ozbubeného řemene a řemenic na jednotlivých pohonných tyčích. Jsou to nerezové trapézové závitové tyče se stoupáním 1mm a průměrem 8mm, uložené v dělených mosazných matkách (stavitelných vůči sobě pro vymezení vůle). Toto by ale bylo pro váhu zrcadla hrubě nedostačující, docházelo by ke křížení závitu a uhýbání zrcadla. Proto jsou tyto závitové tyče pouze jako pohonné, nikoli nosné, a vlastní váhu zrcadla+objímky v jakékoli poloze nese trojice lineárních vedení (vozíky + kolejnice Hiwin) po stranách objímky. Tím je zajišteno téměř bezvůlové uložení a přitom hladký chod, který utahne malý krokový motorek velikosti NEMA 17.
Pohyblivá objímka ostření pomocí promárního zrcadla - strana pohonu
Kolimace primárního zrcadla (jednorázová, při kompletaci přístroje) se dělá pomocí trojice šroubů na kterých jsou umístěna vahadla. Kolimace takto řešeného přístroje se totiž liší od kolimace klasického newtonu s jedním výtahem. U tohoto přístroje musí být osa primárního zrcadla totožná s osou tubusu a zároveň totožná s osou rotace rotátoru sekundárního zrcátka. To jsem zajistil tím, že lze kolimovat primární zrcadlo, a zároveň je kolimovatelný i vlastní rotátor sekundáru vůči pavouku (držáku sekundáru). Rotátor sekundáru má sundavatelný klínek se zrcátkem, a uvnitř těla má zjustovaný kolimační laser, který je souosý s osou rotace mechanismu rotátoru. Toto zosení jsem udělal projednou, po jeho vyrobení. Srovnal jsem laser, aby stopa paprsku zůstávala při rotaci na místě i na vzdálenosti 6m, a šroubky laserového modulu zakápnul lepidlem.
Prvním krokem tedy je, že se zjustuje celý rotátor sekundáru, aby paprsek při jeho rotaci neopisoval kružnici, ale stál na místě a mířil do vyznačeného středu primárního zrcadla. Tím je zajištěna sousosot rotátoru sekundáru s osou tubusu. V dalším kroku se zjustuje primár, aby se laser vrátil zpět, odkud vyšel. Tím je zaručena souosost všech členů soustavy a od této doby již není možno kolimovat soustavu primárním zrcadlem. Nasadí se klínek se sekundárním zrcátkem, a postoupí se ke kolimaci jednotlivých výstupních objímek pro korektory. Nyní se přidává další podmínka - kolimace musí být platná pro všechny výstupy pro korektory současně. Byl zvolen postup, kde se soustava nejprve zkolimuje pomocí sekundáru v poloze pro korektor s největší fullframe kamerou, a pak pro ostatní polohy rotátoru. Zde ale nastává problém, že by musely být dokonale přesně usazeny i zbylé tři objímky korektorů, protože není možné sekundár překolimovávat po každém pootočení rotátoru. Je jasné, že s takovou přesností vyvrtat otvory a usadit objímky dopředu nelze. Vymyslel jsem proto takový mechanismus justování objímek, který umožňuje jejich příčný posun (nastaví osu výtahu aby nebyla mimoběžná s osou tubus, ale protínala ji) dále podélný posun (nastaví polohu výtahu ve směru osy tubusu, aby průsečík obou os ležel na povrchu sekundáru) a náklon příruby výtahu (pro případ že není zkolimováno v přesně pravém úhlu - tato podmínka je sice nadbytečná, ale zjednoduší seřízení, které má nyní ne pouze jedno řešení, ale nekonečno řešení v různých úhlech). Z toho plyně několik odlišností při kolimaci. Nejzásadnější je zakázat si klasickou kolimaci postupem sekundární a následně primární zrcadlo. Na primární ani sekundární zrcadlo se nesmí po prvotním zkolimování již sahat, a veškerou kolimaci (pokud by snad byla třeba) dělat pomocí pozicování korektorů v objímkách, jejichž mechnismus umožňuje dosažení správného zkolimování pouze jejich pohybem.
Takto vypadá dalekohled složený u mne na zemi v pracovně, po první testovací kompletaci jednotlivých dílů tubusu a ověření, že vše funguje a lze zkolimovat a zaostřit. V detailu je vidět systém pro upínání jednotlivých korektorů.

Poté byl dalekohled opět rozebrán, a již rozvrtaný tubus se všemi otvory odvezen ke kolegovi, a pomocí flokovacího zařízení opatřen zevnitř sametovým nástřikem. Tím se předešlo jeho zaprášení sametu při vrtání a řezání, byť za cenu dvojího složení.
Souběžně s výrobou dalekohledu jsem řešil, jak celé 45kg monstrum na montáži vyvážit. Montáž s hmotností dalekohledu problém nemá, ale po žádosti o nacenění přířezů z 200mm tlusté nerezové kulatiny jsem se nestačil divit ceně (a ceně za řezání). Tak jsem tuhle myšlenku rychle opustil a začal se smiřovat s tím, že to bude z normální oceli, a nalakované. Nevýhodou je, že na tom chladném závaží často kondenzuje voda, a stačí někde odprýsknutá barva, a hned to rezne. Proto byla původní menší 8kg a 5kg závaží na 300-ku nerezová. Ale na tento stroj ta původní závaží bohužel nestačí. Pak jsme ale dostal nápad na celkem elegantní řešení. Na bazaru jsem objevil levně olovo (za zlomek ceny nerezu). Tak jsem si nechal nařezat 100mm a 50mm dlouhé prstýnky z nerezové trubky o průměru 200 a 45mm a z nerezového 4mm plechu vypálit bočnice s otvorem. Z dvojice trubek a těch bočnic jsem pak svařil duté závaží, které jsem vylil olovem, a po vychladnutí nerezový plášť načisto přesoustružil. Vznikla tak hezká závaží za zlomek ceny celonerezových, navíc kompaktnější. Jedno 30kg, druhé 15kg, a jako doplněk jsem pak použil ještě jedno 8kg od 300-ky newtona.
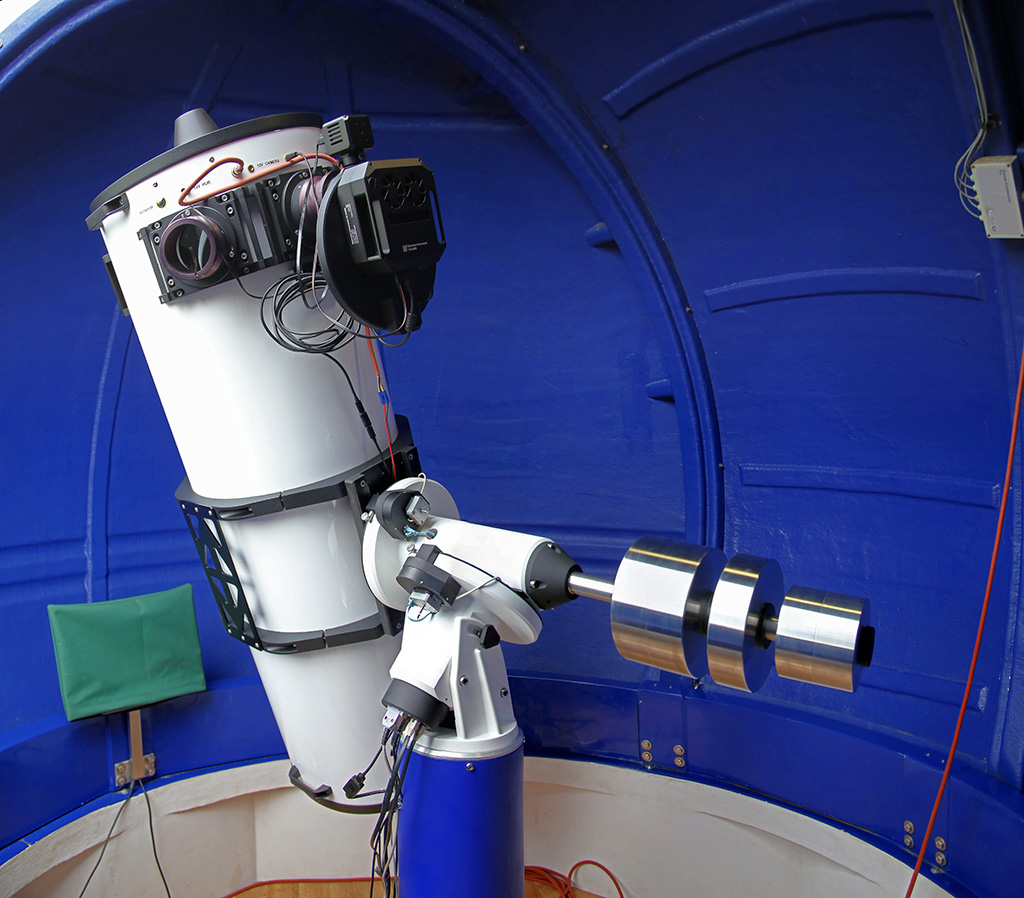
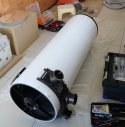
Když bylo vše nachystané, tak jsme konečně se synem celý dalekohled (bez třmenů) prosoukali po úzkých příkrých schodech poklopem v podlaze do kopule. Půlky třmenů pasujících na upínací desku jsme přišroubovali jako první, pak jsme do nich ve dvou posadili dalekohled (je pro tento účel opatřený čtyřmi madly), a zaklopili druhou polovinou třmenů a utahli tak, aby to neproklouzlo. Dalekohled je nyní osazen pouze kamerou C3-61000, ostatní výstupy jsou zatím neosazené. Postupně je budu obsazovat a kolimovat. Dále ještě musím vyrobit do upínací desky konektrový blok pro protažení USB3 osami a zkulturnit provizorní kabeláž. Stávající kabeláž je USB2, a to by si již zasloužilo obměnu.
Zbývá ještě dodělat rosnici (je konstruovaná jako odnímatelná) a doplnit nějaký kryt pro automatické zavíraní.
Dalekohled již s kamerou C3-61000 absolvoval první světlo. Zatím pouze rychlovka s nepřesnou kolimací, protože bylo jasné, že další jasná noc v dohledné době nebude. Jako cíl jsem vybral detail mlhoviny Severní Amerika (NGC7000) tzv. Cygnus wall. Prosím o ignoraci tvaru hvězd, tohle je opravdu pouze první nástřel, s nahrubo zjustovaným korektorem. Rozlišení je snížené na 2/3 fyzického rozlišení kamery, tedy okolo 0.67"/pixel (více stejně nemělo smysl kvůli seeingu). Detaily v mlhovině jsou fantastické. Celkem jde o necelé 3 hodiny snímání. Na klik plné rozlišení.
