Do jeho stavby jsem se pustil z
důvodu velké pracnosti manuální pointace na mé
levné montáži od GS Optical. Kvalitní OAG již mám,
komakorektor také, tak proč si kazit snímky chybnou
pointací. Navíc, při manuální pointaci lze využít
z celého rozsahu možných poloh mimoosého hledáčku
stěží 120°, kdežto při použití kamery je to
plných 360° (kameře narozdíl ode mne nevadí, že je
vzhůru nohama). Vzhledem k tomu, že vlastním notebook,
bylo rozhodnuto, že autopointer bude řešen jako
program na PC, nikoli jako autonomní zařízení (byť
mě tato myšlenka stále láká).
První, co mne napadlo, bylo
samozřejmě najít nějaký již hotový program, který
umí pointovat. Je jich na WEBu k nalezení poměrně
dost, ale žádný mne příliš nepřesvědčil (časté
padání, nevhodné rozhraní - obvykle na nějaký v USA
běžný dalekohled se standardním rozhraním, program
byl obvykle navíc spojený se software pro snímání
CCD snímků, což nepotřebuji).
Pro mé účely potřebuji naopak
stabilní program, který vydrží zaručeně pointovat
velmi dlouho (několik hodin), s jednoduchým rozhraním,
které bude podle polohy zvolené hvězdy
zapínat/vypínat jemné pohyby dalekohledu (například
po připojení místo pákového ovladače mojí
elektroniky).
Následující řádky jsou
ukázkou toho, jak je možné tento problém řešit.
Kapitola je postupně doplňována podle toho, jak budu
mít čas psát dokumentaci k celému řešení.
V současné době mají kromě
mne tento autopointer minimálně další dva majitelé. Ukázky realizace jsou
zde. Pokud máte k dispozici
vhodný notebook, či můžete (např. v pozorovatelně)
použít stolní PC (min. požadavky na něj viz níže.)
je pořizovací cena včetně vhodné WEBkamery okolo
4000 Kč, při vlastní stavbě, při stavbě mnou na
zakázku asi o 1000 Kč více (za práci). To je zhruba
5-10x méně než cena komerčního hotového
autopointeru.
Popis hardware
WEBkamera:
Je třeba co nejkvalitnější, s nízkým šumem a
vysokou citlivostí, naopak na rozlišení příliš
nezáleží. Vyhoví i černobílá, ovšem ochudíte se
o možnost pořizovat s ní barevné snímky planet, což
je druhá možnost jejího využití. Každopádně by
měla mít CCD snímač, nikoli CMOS. Měla by fungovat
od osvětlení 1 lux nebo méně. Vhodné rozhraní je
USB, neboť paralelní port je dobré mít volný pro
ovládání montáže. Kamera musí mít možnost
manuálního nastavení doby expozice, počtu snímků za
sekundu a zisku zesilovače. Pokud kamera má pouze
automatické nastavení, tak se jí vyhýbejte. Je to
zdroj problémů.
Asi nejvhodnější typy jsou
Philips Vesta Pro nebo novější Philips ToUcam Pro,
kterou mám já. Také nejnovější typy od Logitechu
(QuickCam) by mohly být dobrou volbou pokud mají CCD
čip.
Kameru je třeba vhodně upravit
pro připojení k dalekohledu. Existují dvě možnosti.
První z nich je vyrobení redukce, která se jedním
koncem šroubuje místo objektivu kamery a na druhé
straně má standardní průměr 1.25". Na
většině kamer je jemný závit M12x0.5, takže k
vyrobení adaptéru potřebujete pouze šikovného
soustružníka. Druhou možností (tu jsem použil i já,
viz. obrázek) je přestěhování celého plošného
spoje vyjmutého z krabičky kamery do vlastní krabičky
se správným zakončením. Při této příležitosti je
vhodné odpojit nebo zabarvit či přelepit LED diodu
signalizující běh kamery (pokud ji kamera má). Mnohdy
totíž svítí tak, že v noci značně ruší, či
dokonce světlo proniká na čip a trochu zvyšuje jas
pozadí při nejvyšších citlivostech kamery.
Notebook:
Procesor nejvíce zatěžující činností je přenos
snímků z kamery do PC. Většina kamer má na krabici
či v návodu udanou minimální konfiguraci, na které
je schopná fungovat. Obvykle ale v nejnižším
rozlišení, což může být trochu problém. Podle mne
je takovým minimem, na kterém dokáže spolehlivě
běžet systém Windows, ovladač kamery a můj program
počítač s taktem okolo 200-300 MHz a pamětí
minimálně 32MB (na něm to je odladěno a trochu
zoptimalizováno) Je třeba velká výdrž akumulátorů
při provozu mimo síť, nebo možnost připojení na 12V
v autě.
Adaptér na paralelní
port PC: Protože se ukázalo, že ovládat
zapínání korekčních pohonů po přesně definovanou
dobu pod operačním systémem Windows (jakýmkoli, W95
počínaje a XP konče) je nerealizovatelné (nízká
přesnost časování - hlavně na pomalých
počítačích), navrhl jsem adaptér s jednočipovým
procesorem, který odměřuje doby zapínání pohonů
nazávisle na vytížení PC přesně. Je ve formě
krabičky, která se připojuje na LPT port. Zapínání
pohonů se děje na čtyřech výstupech, které si
můžete přiřadit ke směrům RA+/- a DE+/- libovolně.
V programu to lze pak nadefinovat. V tomto řešení se
jedná o připojování výstupů pomocí tranzistorů k
zemi. Adaptér je napájen přímo z LPT portu, takže
nejsou třeba žádné další kabely a zdroj. Schéma
zapojení je zde.
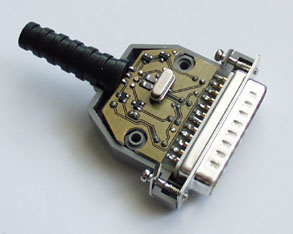
Adaptér je realizován na
malém plošném spoji přímo v konektoru na
paralelní port. Mám vyrobeno několik dalších kusů plošných spojů, takže jsou k dispozici dalším
případným zájemcům. Mohu zaslat přímo
osazené, neboť se jedná zčásti o SMD
součástky, které vyžadují při pájení
jemné nástroje a speciální patici pro
naprogramování procesoru v SMD provedení.
Čtyři LED diody slouží ke kontrole funkce.
Pokud LED svítí, je odpovídající výstup
sepnut. Podle blikání LED lze tedy kontrolovat
i četnost oprav chodu montáže. Adaptér je
třeba připojit co nejblíže k PC, ideální je
přímo na port. Kabel od adaptéru k montáži
naopak může být velmi dlouhý, i několik
desítek metrů.
Popis programu
Program je ve svém principu
(nikoli však v provedení) velmi jednoduchý. Přes
standardní ovladač kamery, instalovaný do systému
Windows, přijímá snímky z kamery a vyhodnocuje polohu
zvolené pointační hvězdy. Na základě její odchylky
od počáteční polohy vystavuje výstupy adaptéru
připojeného k paralelnímu portu, ke kterým jsou
připojeny přes nějaké vhodné rozhraní či přímo
(záleží na konstrukci) pohony pro jemné pohyby
dalekohledu.
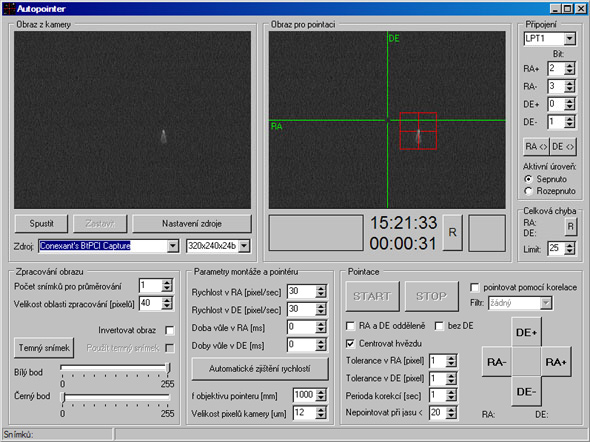
Kvůli snížení
citlivosti na chvění (seeing, vítr) a
snížení šumu má program možnost
zpracování snímaného obrazu formou
průměrování více snímků a úpravu jasu a
kontrastu snímku pomocí manipulace s černým a
bílým bodem obrazu.
Dále je nutno zadat 4
parametry vaší montáže. Jedná se o rychlost,
jakou se při jemných pohybech v RA a v DE
pohybuje hvězda po čipu CCD kamery respektive v
obraze na monitoru (v počtu pixelů za sekundu).
Dalšími dvěma parametry je doba, za kterou
přejede pohon případnou vůli při změně
směru pohybu. Doba se zadává v milisekundách
Parametry objektivu
(ohnisková vzdálenost v milimetrech) a kamery
(velikost pixelů v mikrometrech) slouží k
výpočtu celkové chyby pointace.
Pro vlastní pointování
je třeba zvolit toleranci v obou směrech
(nedoporučuji 0 ale ani ne větší než 2
pixely, záleží na kvalitě montáže a
ohniskové vzdálenosti se kterou fotografujete).
Dalším parametrem je četnost oprav. Jedna až
dvě sekundy jsou optimální hodnota, více již
může způsobit nepřesnosti, hlavně na
horších montážích. Při dobře ustavené
montáži, která má však velkou vůli v DE,
lze vypnout pointování v DE a dělat ho jednou
za několik minut až desítek minut ručně,
vychází to obvykle lépe než automaticky.
Limit poklesu kontrastu
snímku, při kterém pointer ignoruje hvězdu a
nepointuje, se nastaví sám při odstartování
pointace, podle jasu hvězdy a kvality obrazu.
Lze ho však dodatečně upravit. Tato funkce má
ten význam, že například umožňuje zakrýt
dalekohled v průběhu fotografování (blíží
se auto s rozsvícenými reflektory, je třeba si
posvítit a něco zkontrolovat atd...) a po
odkrytí pokračovat dále. Také krátkodobé
schování hvězdy za mrak, drcnutí do
dalekohledu, poryv větru a podobně pomůže
tato funkce zvládnout.
Možnost pořízení a
odečítání temného snímku (dark frame), pro
zlepšení kvality obrazu při slabé hvězdě a
nastavených vyšších citliviostech kamery.
Zobrazení aktuálního
času a funkce stopek (pro měření doby
expozice)
Je také třeba nastavit
přiřazení jednotlivých bitů výstupu ke
směrům pohybů pohonů a zvolit, zda se pohon
spíná do pohybu logickou 1 nebo 0 na výstupu.
To záleží na tom, jakým způsobem je
vyřešeno připojení pohonů montáže na port.
Naposledy nastavené
parametry se po vypnutí programu pamatují a
použijí při příštím spuštění.
Program by měl fungovat
na libovolné verzi windows, WIN 95 počínaje a
WIN XP konče, protože obsluha kamery i
paralelního portu je napsána
"poctivě", jediným legálním
způsobem přes drivery (tedy žádné přístupy
natvrdo na porty).
Způsob připojení pohonů či
elektroniky montáže
Připojit lze každý dalekohled,
který má rozhraní na autopointer takové, že se
jemné pohyby v osách zapínají připojením vždy
jednoho ze čtyř vstupů (RA+, RA-, DE+ a DE-) k zemi,
Takovýto vstup mají například dalekohledy Meade řady
LX (zásuvka na 6 pólový telefonní konektor).
Připojení jednotlivých pinů je tam následující:
Adaptér má výstupy řešeny
jako otevřený kolektor (viz schéma). Maximální
spínané napětí je 30V, max. proud 250mA.
Každopádně si prostudujte dokumentaci ke svému
dalekohledu, pokud má vstup na autopointer, jak je
zapojen. Pokud si nevíte rady, oznamte mi typ
dalekohledu, pokusím se tyto údaje zjistit.
Nepřebírám na sebe žádnou odpovědnost za
případné zničení elektroniky dalekohledu v
případě chybného zapojení.
Další možností je připojení
přes tlačítkový ovladač dalekohledu. Pokud lze
ovladačem pointovat jemnými pohyby manuálně, stačí
si vyvést od tlačítek vodiče ven z ovladače na
vhodný konektor a na něj připojit výstupy z
adaptéru. Ověřte si ovšem voltmetrem, že tlačítka
spínají proti společné zemi, a ampérmetrem to, že
proud nepřesahuje výše uvedený limit. Pokud
tlačítka nespínají proti společné zemi, lze
provést připojení podobně ovšem oddělené pomocí
optočlenů. V případě nejasností u konkrétního
dalekohledu mne kontaktujte.
Poslední možností je varianta,
kdy pohony stavíte. V takovém případě ale jistě
zvládnete jejich navrhnutí tak, aby šel adaptér
připojit bez úprav.
Změny ve verzi 1.5 (29.3.2004)
Je možno navolit jako port i sériový port COMx. Používá se pro účely přímého propojení s novou elektronikou EQ6, kterou konstruuji. V tomto případně není pointační adaptér na paralelní port nutný. Další informace zde budou po dohotovení zařízení.
Program po odstartování pointace tlačítkem START zapisuje hodnoty odchylek do souboru, jehož název je vytvořen z data a času započetí pointace. Tento soubor lze později využít k vyhodnocení přesnosti pointace. Jednotlivé položky jsou odděleny středníkem, významy sloupců jsou takovéto: čas od počátku pointace v [s]; skutečný čas [hh:mm:ss.ss]; Odchylka RA ["]; Odchylka DE ["]; Odchylka RA [um]; Odchylka DE [um]. Pro správné údaje je třeba mít dobře zadanou ohniskovou vzdálenost pointeru a velikost pixelů kamery.
Funkci zápisu do souboru lze s výhodou použít i pro zjištění průběhu periodické chyby. Stačí nepropojit montáž s PC, aby nemohla dělat opravy. Pointer tedy pouze sleduje hvězdu a do souboru vypisuje odchykly, vzniké periodickou chybu. K vykreslení průběhu per. chyby můžete použít váš oblíbený SW a data ze souboru do něj načíst.
Změny v nové verzi 1.6 (5.7.2004)
Opravena chyba při zápisu odchylek do souboru. Záporné odchylky v úhlových vteřinách se zapisovaly jako kladné.
Tipy a triky pro snadné použití
Instalace a
spuštění programu: Obsah zip souboru
rozbalte do libovolného adresáře. Pokud máte
Windows 95,98, nebo Me, můžete program rovnou
spustit (AutoGuider.exe). Při použití pod
Windows NT, 2000 nebo XP musíte instalovat
driver pro přístup na porty. Spustíte
Install.exe, je třeba mít administrátorská
přístupová práva. Je vhodné mít před
spuštěním programu instalovaný driver na
kameru a kameru připojenu. Pokud při prvním
spuštění programu vyběhne okénko s chybovým
hlášením: Error 0, Can't create video
capture filter... nebyla nalezena kamera.
Vyberte ji proto manuálně. Při příštích
spuštěních by se již toto hlášení nemělo
objevit. (Pokud nezměníte kameru, či
nepřenesete program na jiné PC)
Noční režim:
Jak nastavit červený noční vzhled programu?
Nejlépe pomocí nastavení vzhledu windows.
Zadefinujte si ve vlastnostech obrazovky podobné
barevné schéma. Má to tu výhodu, že se takto
změní i okénka od ovladače kamery a také
všechny ostatní programy budou mít podobný
vzhled. Problémem může být to, že na
většině notebooků nelze příliš stáhnout
jas. Zde pomůže ještě tmavě červená folie
přes displej.
Nastavení kamery:
V první fázi je nutno najít pointační
hvězdu stejně jako při manuální pointaci.
Ať již používáte OAG nebo pointační
dalekohled, je nutno vložit pointační nebo
krátkoohniskový okulár, a zvolenou hvězdu
umístit doprostřed zorného pole. Pak můžete
vyměnit okulár za kameru. V okně obraz
z kamery zvolíte zdroj videa.
Pokud máte jen jeden driver (k jedné kameře),
bude již zvolen automaticky. Pak stisknete
tlačítko Spustit.
Měl by se objevit obraz z kamery. Rozbalte box Formát
obrazu a nastavte nejlépe
320x240 pixelů. Program sice funguje i s jinými
formáty, ale při tomto rozlišení se využije
celý čip kamery. Při vyšším rozlišení se
využije jen výřez, naopak nižší rozlišení
nedoporučuji. Pak stiskněte tlačítko Nastavení
zdroje. Objeví se dialogové
okno ovladače kamery. Jeho vzhled závisí na
typu kamery. Je třeba kameru nastavit do
manuálního módu a nastavit takové parametry,
aby byla hvězda patrná. Mě se u Philips ToUcam
Pro osvědčilo nastavení do černobílého
módu, expoziční doba 1/25 sec, zisk
zesilovače na maximum nebo o něco méně,
počet snímků někde mezi 5-20 snímky/sec,
podle jasnosti hvězdy. Doporučuji použít
přednostně co nejdelší expoziční čas a k
němu nejmenší možný zisk zesilovače. Tak
dosáhnete obrazu s nízkým šumem. Také je
vhodné manipulovat s parametrem Gamma, aby obraz
byl co nejvíce kontrastní. Dále je třeba
obraz hvězdy přesně zostřit, tak, aby měl co
nejmenší rozměr. Pokud používáte OAG a
obraz trpí komou, je třeba zaostřit tak, aby
obraz vlastní hvězdy byl jasný a malý,
velikost "ocásku" není kritická,
program ho obvykle ignoruje a chytne se na jasné
"jádro". Pokud ne, zkuste použít filtr - dekonvoluci.
Vlastní
pointování: Pokud již máte nalezenou
vhodnou hvězdu, je třeba nyní zajistit to, aby
při mačkání tlačítek RA+,
RA-,
DE+,
DE-
se hvězda pohybovala v obraze ve správných
směrech (RA+ doprava, RA- doleva, DE+ nahoru,
DE- dolů) Toho dosáhneme natočením kamery a
přiřazením výstupů (bitů 0-3) jednotlivým
pohonům. Pokud některý směr funguje
obráceně, lze to snadno napravit stiskem
tlačítek RA<>
respektive DE<>,
který prohodí odpovídající bity, nebo je
přepsat ručně. Mírný nesouhlas ve směru
pohybu (do úhlu tak 10-20° ) nevadí. Také v
tomto okamžiku můžeme pomocí jezdců černý
a bílý bod
nastavit optimální jas a kontrast obrazu, aby
byla hvězda dobře vidět. Pokud je zisk
zesilovače kamery nastaven na maximum a v obraze
je mnoho šumu, lze nastavit průměrování
dvou či více snímků, popřípadě
odečítání temných snímků. Šum tím
poněkud klesne. Pokud jste s obrazem spokojeni,
klikněte v okně Obraz pro
pointaci myší na hvězdu.
Záměrný kříž ji nyní bude sledovat. Pokud
je sledování spolehlivé, můžete stisknout
tlačítko Start. Zelený kříž se přemístí
do aktuální polohy hvězdy a červený kříž
sleduje polohu hvězdy. Dojde-li k odchylce,
vysílá korekce do adaptéru na paralelním
portu, který spíná pohony, aby udržoval
hvězdu na stálé pozici. Proces se projevuje
blikáním LED na adaptéru, vypisováním doby
zapnutí pohonů v řádcích korekce
v RA a korekce
v DE a celková odchylka
(maximální) se vypisuje v okénku celková
chyba. Pokud aktuální chyba
překročí hodnotu nastavenou v okénku limit,
ozve se pískání z adaptéru. Zastavení
pointování se provede stiskem tlačítka Stop.
Pokud poklesne kontrast obrazu pod limitní
úroveň, zmizí z kontrolního okénka s
hvězdou nápis OK a pointér neprovádí
korekce. To se může stát například při
přechodu mraku, při zakrytí tubusu z
nějakého důvodu a podobně. Po obnovení
obrazu hvězdy se pointace opět spustí a
případné vzniklé odchylky se opraví.
Odečítání
temných snímků: Pro neznalé, jedná
se o eliminaci efektu, kdy ani po naprostém
zakrytí kamery není obraz tmavý (vzniká při
delších expozicích a nastaveném vysokém
zisku zesilovače v kameře). Postupujte tímto
způsobem: nastavte kameru do režimu, ve kterém
budete pointovat (tj. nastavte dobu expozice,
zisk, počet snímků za sec.) Pak zakryjte
dalekohled (nebo samotnou kameru) a nastavte
průměrování tak na 10 či více snímků.
Počkejte, až se ukáže alespoň jeden
zprůměrovaný snímek a klikněte na tlačítko
temný snímek.
Až se uschopní volba použít
temný snímek, jejím
zaškrtnutím funkci aktivujete. Průměrování
můžete nyní vrátit na rozumnou hodnotu či
vypnout (dát tam 1). Výsledkem odečítaní
temných snímků je to, že obraz ztmavne a
hvězda bude lépe patrná. Při změně
parametrů snímání je obvykle třeba pořídit
nový temný snímek.
Funkce Centrovat
hvězdu: Tuto funkci jsem přidal z
důvodu, že když jsem si v průběhu focení
omylem stopnul pointaci a znova ji zapnul, tak
program vzal jako výchozí polohu aktuální
pozici hvězdy, která se mezitím mohla trochu
změnit. Pokud je funkce aktivována, tak program
po odstartování pointace bere za referenční
bod vždy střed obrazu. Pokud je hvězda jinde,
tak ji tam po odstartování pointace posune.
Rozladění kompozice záběru na filmu je
nepatrné neboť pohyb může být maximálně o
polovinu rpzměru CCD čipu, což je v tomto
případě maximálně okolo 2.5mm (kdyby byla
hvězda v rohu). Pokud není možnost
zaškrtnuta, program pointuje na pozici, ve
které byla hvězda v okamžiku odstartování
pointace.
Funkce bez DE: Nevyhodnocují se odchylky a nedělají korekce v DE, pointuje se tedy pouze v RA, korekce v DE buď nejsou nutné, nebo je lze dělat manuálně.
Funkce RA a DE odděleně:(nové) Tato funkce umožňuje provádění oprav v RA a DE střídavě, nikoli najednou. Je to pro případ, že máte montáž, která neumí dělat opravy v obou osách najednou, třeba Losmandy GM8, G-11 a podobně.
Funkce
automatické zjištění rychlostí:Změří přiblizně rychlost jemných
pohybů montáže tak, že si několikrát
popojede hvězdou v RA i v DE. Před použitím
funkce musíte mít zaměřenou hvězdu a mít ji
poblíž středu obrazu.
Filtr:(nové - přepracované)
V boxu je možno vybrat několik typů filtrů:
Žádný - obraz se použije tak, jak vypadá v okně "obraz pro pointaci".
3x3 - Pokud je obraz hvězdy velmi slabý a malý
(přibližne 2-4 pixely) použijte tuto funkci. Je zhruba ekvivalentní režimu "faint mode" u pointérů SBIG. Každý bod obrazu je nahrazen součtem 8 okolních pixelů. Zvýší se výrazně jas hvězdy a kotouček se stane větším, pointér lépe drží na hvězdě utopené v šumu CCD čipu. Úrovně obrazu jsou navíc normalizovány tak, aby nejjasnější místo obrazu mělo plný jas (255).
5x5 - ekvivalent k předchozímu filtru 3x3 ale pro
větší obraz hvězdy (pokud třeba trpí na okraji zorného
pole nějakými vadami, např. koma. Zlepší se tím přesnost detekce středu
objektu).
Dekonvoluce - poměrně komplikovaný matematický postup, kterým lze eliminovat výrazně různé druhy aberací (koma, otvorová vada, astigamtismus) které zhoršují přesnost pointace. Má význam hlavně pointujeme-li pomocí OAG a obraz hvězdy daleko od optické osy již není bodový či kruhový. Pokud zvolíme tuto volbu, objeví se vedle tlačítko označené def. kliknutím na něj se otevře okno pro definici filtru. Než tak učiníte, nejprve zaměřte hvězdu, nastavte vše tak, jak bude použito pro fotografování. Filtr se totiž naučí na konkrétní geometrii optické aberace, a pak již není možné kamerou otáčet, protože by se změnila poloha obrazu. Po otevření okna filtru klikněte na tlačítko "obnov referenční obraz" Po deseti snímcích se v okénku objeví zprůměrovaný obraz hvězdy postižené optickou vadou. pomocí jezdce práh nastavte takovou hodnotu, aby byla červeně označena co největší plocha obrazu hvězdy, ale minimálně či žádné pixely mimo ni. Poté pomocí jezdců "zisk" a "Iterací" nastavte výsledný obraz (je vidět v malém okénku hlavního okna programu, vedle stopek a času) Měl by být rozumně jasný a co nejvíce pravidelný. Jezdec "zisk" ovlivňuje jas a velikost kotoučku. Jezdec "Iterací" udává počet opakování výpočtu konvoluce obrazu s filtrem. Vyšší hodnota dává pravidelnější obraz, ale výrazně prodlužuje čas výpočtu. Optimum je tak 3-5 iterací. Po nastavení pomocí OK okno zavřete a spusťte pointaci. Funkci používejte pouze při výrazných optických vadách obrazu, když pointér nedrží dobře místo na nejjasnějším bodu obrazu. Pro kulaté tvary obrazů hvězd nemá žádný význam. Je velmi náročná na výkon procesoru. Rozumným minimem je takt 400Mhz.
Použít metodu
korelace:
Metoda umožňující sledovat obecný objekt
(třeba útvar na povrchu Měsíce), nebo objekt
větší než zhruba 10 pixelů, na který již
nefunguje normální metoda pro hvězdy. Je
výpočetně značně náročná, doporučuji
nastavit oblast zpracování jen na 20-40
pixelů, při větším rozměru se četnost
korekcí dramaticky zpomaluje. Také zde je výhodou
rychlejší počítač.
Zdrojový kód programu
pro PC (Delphi 6) + zdrojový kód programu do
procesoru (Keil C51), o tyto zdrojové kódy si
mi napište E-mailem,
který bude obsahovat popis toho, co s nimi
zamýšlíte (viz důvod na konci stránky). Já
pak sdělím další potřebné informace a kódy
zašlu.
Pro programátory a šťouraly ...
Proč je použit
adaptér a pohony se nespínají přímo portem:
Důvodem je problematické odměřování časů
zapnutí pohonů s přesností v řádu desítek
milisekund, pokud běží USB kamera. Driver
většiny kamer běží jako proces s velmi
vysokou prioritou, takže po dobu přenosu
snímku aplikační program prakticky stojí.
Výsledkem byla proměnlivost délky pulsů pro
zapínání pohonů, a to tak výrazná, že
způchobovala chyby v pointaci. Nepomohly ani
takové pokusy, jako napsání řídící rutiny
jako separátní thread s prioritou TimeCritical,
ani jiné obdobné přístupy. Driver kamery má
vždy přednost a na pomalejších počítačích
(okolo 400MHz a méně) je efekt velmi výrazný.
Přijatelná přesnost se ukázala teprve při
použití taktu okolo 1GHz, kde již přenos
obrazu po USB PC stíhá s dostatečnou rezervou.
Pokud někdo znáte způsob, jak generovat na
portech pod Windows přesně pulsy, dejte mi
vědět.
Proč se musí u
WIN NT, 2000 a XP instalovat driver pro přístup
k portu: Protože tyto systémy
založené na NT jádře neumožňují přímý
přístup k hardwaru (pokus o to skončí
hlášením "illegal instruction")
Jediný legální způsob je využití služeb
kernel driveru. Zde byl použit freewarový
DriverLINX (www.driverlinx.com).
U Win 95,98 a ME není tento driver nutný.
Proč je adaptér
připojený na LPT portu: Z důvodu
napájení, aby nepotřeboval zdroj a žádné
další kabely. Napájen je spojenými čtyřmi
datovými bity nastavenými do log. 1. Použitý
procesor funguje od 2.8 do 6V, takže napájení
z LPT vyhoví.
Lze adaptér
upravit pro konkrétní dalekohled:
Většinou ano. Pokud má dalekohled jemné
pohyby v obou osách ovládané ovladačem se
čtyřmi tlačítky (RA+/- a DE+/-), pak obvykle
stačí vyvést z ovladače drátky od kontaktů
těchto tlačítek a připojit je na čtyři
výstupy z adaptéru, které jsou spínané
koncovými tranzistory (viz. schéma). Pokud
pohony pro dalekohled teprve stavíte, je vhodné
si je udělat tak, aby je bylo možno ovládat
spínáním čtyř vstupů, dva pro oba směry v
RA a dva pro oba směry v DE. Pokud by bylo
třeba přizpůsobit adaptér na nějaký již
existující interface od komerčního
dalekohledu, tak je to možné provést po
dohodě, pokud znáte (nebo víte kde sehnat
popis) způsob ovládání dalekohledu, a pokud
to bude v mých silách.
Proč nejsou
zdrojové kódy volně k dispozici ke stažení:
Z jednoho prostého důvodu, jde o poměrně
rozsáhlou věc, která je napsána v Borland
Delphi 6, která vyžaduje mít nainstalovány
další dvě komponenty (TDlPortIO a EAVcap -
musím Vám je zaslat spolu se zdrojáky, aby to
šlo přeložit) a navíc je spousta triků, jak
to nakonfigurovat, aby to bylo možno zprovoznit
a přeložit. Také chci mít kontrolu nad tím,
kdo tuto věc třeba dále rozvíjí, abych se
dozvěděl, jaké nectnosti to má, a jak je
třeba lze vylešit. Pokud tedy máte vážný
zájem program se mnou vyvíjet a vylepšovat,
tak si o něj napište a trošku mi v E-mailu
přibližte, co s ním zamýšlíte.
 WEBkamera:
Je třeba co nejkvalitnější, s nízkým šumem a
vysokou citlivostí, naopak na rozlišení příliš
nezáleží. Vyhoví i černobílá, ovšem ochudíte se
o možnost pořizovat s ní barevné snímky planet, což
je druhá možnost jejího využití. Každopádně by
měla mít CCD snímač, nikoli CMOS. Měla by fungovat
od osvětlení 1 lux nebo méně. Vhodné rozhraní je
USB, neboť paralelní port je dobré mít volný pro
ovládání montáže. Kamera musí mít možnost
manuálního nastavení doby expozice, počtu snímků za
sekundu a zisku zesilovače. Pokud kamera má pouze
automatické nastavení, tak se jí vyhýbejte. Je to
zdroj problémů.
WEBkamera:
Je třeba co nejkvalitnější, s nízkým šumem a
vysokou citlivostí, naopak na rozlišení příliš
nezáleží. Vyhoví i černobílá, ovšem ochudíte se
o možnost pořizovat s ní barevné snímky planet, což
je druhá možnost jejího využití. Každopádně by
měla mít CCD snímač, nikoli CMOS. Měla by fungovat
od osvětlení 1 lux nebo méně. Vhodné rozhraní je
USB, neboť paralelní port je dobré mít volný pro
ovládání montáže. Kamera musí mít možnost
manuálního nastavení doby expozice, počtu snímků za
sekundu a zisku zesilovače. Pokud kamera má pouze
automatické nastavení, tak se jí vyhýbejte. Je to
zdroj problémů.